¿Son los radares de baja frecuencia aconsejables para el guiado de misiles contra aviones tácticos?
 |
| Radar móvil VHF |
- Los radares VHF/UHF tienen una resolución bastante pobre. Tienen una resolución pobre en las 3 dimensiones, lo que significa también mala resolución en altitud. Así que esto significa que el volumen de búsqueda de los misiles en la fase terminal sería bastante grande, especialmente cuanto mas lejos está el objetivo, ya que los errores se van acumulando.
- Los radares móviles VHF/UHF tienen un tiempo bastante largo entre las actualizaciones de los tracks ya que usan antenas rotatorias muy grandes. Esto suele ser de unos 5 a 20 segundos, lo que hace que la resolución real sea aún peor, ya que cualquier cambio en la velocidad o el rumbo del objetivo hace que el volumen de búsqueda sea mucho mayor.
- Los misiles tienen un campo de visión bastante estrecho y por lo tanto toma mucho tiempo buscar un gran volumen. El Field of View o campo de vista del misil podría ser más amplio, pero entonces el alcance y la resolución caen de inmediato. El misil que podría ir a +3M tendría un tiempo muy limitado para buscar dentro del volumen antes de que ya no pudiera alcanzar el objetivo aunque lo detectara y pasase de largo.
- Los radares VHF/UHF son sistemas muy grandes y engorrosos los cuales se detectan y geolocalizan con bastante facilidad ya que son sistemas potentes con un ancho de banda estrecho (debido a la baja frecuencia utilizada). Los cazas furtivos como el F-22 y el F-35 muy probablemente sabrían dónde están y qué están haciendo. El F-117 fue derribado porque no tenía conocimiento de la existencia de radares enemigos.
- Los radares VHF/UHF debido a su estrecho ancho de bando, son mucho más fáciles de jamear o interferir que radares de control de tiro en bandas altas pero con un gran ancho de banda más difícil de interferir.
Por todo esto, básicamente podría funcionar en algunos casos el guiado con este tipo de radares, pero es probable que no sea eficaz, especialmente contra cazas dotados de sistemas modernos de ESM/EW que puedan detectar el radar. Incluso si el radar pudiera funcionar libremente sin interferencia alguna, la probabilidad de derribo sería bastante baja debido a la baja resolución del radar y a la lenta velocidad de búsqueda del volumen de la cabeza buscadora de los misiles. Hay muchas razones por las que los radares VHF/UHF no se han usado como radares de control de tiro, excepto algunos ensayos de misiles contra misiles de crucero. Los radares VHF/UHF sí podrían ser usados para el enganche colaborativo de radares de control de tiro mediante el uso de técnicas de fusión de sensores y ampliar así un poco el rango de adquisición. Más allá de eso, a día de hoy no es posible.
En general, los misiles necesitan un muy buen seguimiento del objetivo, para que llegar al objetivo lo más cercano posible tenga éxito. Pensemos en ello y de las implicaciones de la baja resolución de los radares de bandas bajas:
El radar de VHF detecta un objetivo a unos pongamos 100 km de distancia del radar. Cada detección tiene una precisión de medición de digamos 1000 m en azimut, unos 100 m de distancia y 3000 m de elevación y la detección se va actualizando pongamos cada 6 segundos (bastante rápido para el radar VHF). Estas serían unas especificaciones bastante buenas para un radar VHF y en un alcance de 100 km. Lo que todo esto significa es que un objetivo que vuele a 250 m/s (900 km/h) se va a desplazar unos 1500 m entre detecciones consecutivas y va a haber errores bastante grandes (dentro de la precisión de la medición) en las coordenadas de cada detección en promedio. Si el objetivo va en línea recta, es bastante fácil predecir dónde estará en el punto futuro. Sin embargo, cuando se está maniobrando aunque sea ligeramente, se está volviendo mucho más difícil con el aumento de los errores en la predicción de dónde estará. Recordemos que el radar debe guiar el misil al punto de intercepción que siempre va a estar en un punto a futuro y el misil debe predecir ese punto o algo muy cercano a él. Debido a la precisión antes mencionada y al lento intervalo de actualización, habrá un gran volumen de incertidumbre en el que el misil tendrá que buscar un objetivo. Por ejemplo, sólo la incertidumbre de la altitud será de varios kilómetros en el mejor de los casos.
El cálculo de la velocidad del objetivo también es muy difícil de obtener debido a esos errores y a las lentas actualizaciones. Digamos que hay un error de 500 m (la mitad de la precisión de la medición) en el azimut en dos detecciones consecutivas y el objetivo se mueve unos 1500 m entre esas dos detecciones. La velocidad real es de 250 m/s, pero el radar podría calcular que la velocidad sería cualquier cosa entre 83 m/s y 416 m/s dependiendo de la dirección del error en dos detecciones. El radar naturalmente calcularía la velocidad sobre digamos 10-20 detecciones y calcularía una media, pero entonces cualquier aceleración o desaceleración por parte del objetivo crearía instantáneamente un error bastante grande hasta que el algoritmo de rastreo pudiera volver a seguirlo. Solo cuando el radar no pierde ninguna detección (lo cual no es muy raro, especialmente en los radares de baja frecuencia) rastrea finamente el objetivo. Si falla una sola detección, el volumen de incertidumbre se multiplica instantáneamente.
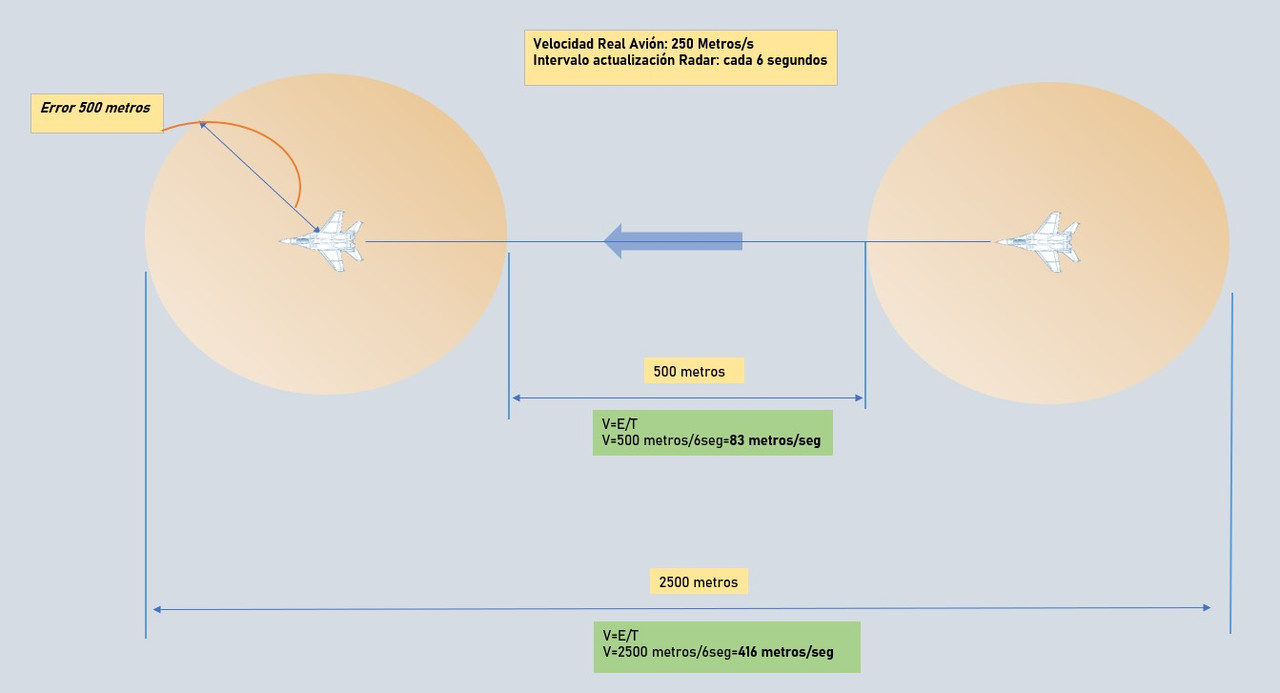 |
| Elaboración Propia |
Básicamente el radar de baja frecuencia está bien para objetivos que vuelan en línea recta y nivelados a velocidad constante, pero las maniobras y los cambios de velocidad son un grave problema. Por eso se utilizan para la alerta temprana y la vigilancia general y no para el guiado de misiles.
Las radares internos de los misiles suelen ir más allá e
irse a la banda Ku más precisa incluso que la X que usan los radares
generalmente de control de tiro de aviones y SAMs.
 |
| Algunos radares con sus rangos publicados de detecciones y su precisión, Fuente: Aviation Week |
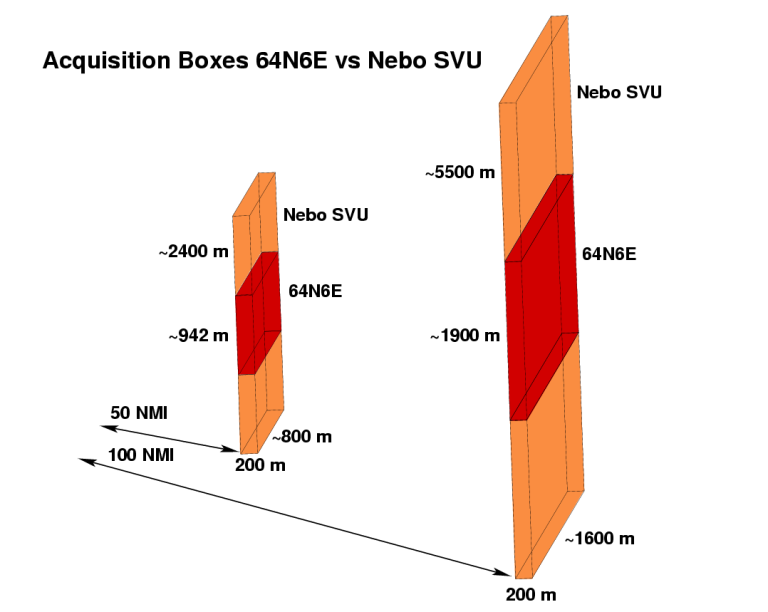 |
| Cajas de Adquisición Nebo SVU banda VHF & 64N6E banda S, Fuente ausairpower.net |
Referencias:
- Aviation Week, Special topic: State of Stealth
- http://www.ausairpower.net/APA-Nebo-SVU-Analysis.html