Sistemas Electroópticos
 |
| IRST Pirate Leonardo |
Hay sistemas o sensores que son bastante desconocidos, los más desconocidos son las suites electrónicas, pero los sistemas electroópticos tampoco es que se sepa demasiado, hay libros al respecto pero muy técnicos y no entran mucho en el funcionamiento básico de los sistemas. Al final, se trata de ir recopilando información de aquí y de allá, textos, foros, etcétera sobre todo de habla inglesa, e ir creando una imagen más o menos acercada a lo que puede ser la realidad. La cual siempre es mucho más avanzada de lo que nosotros suponemos con la poca información pública.
Un sensor electroóptico está compuesto de uno o varios detectores, y distintos tipos de lentes que ayudan a la magnificación de una zona del espacio. Muchos IRST ya incorporan distintas aperturas según conveniencia, WFoV, MfoV y NfoV, esto se conoce como campo de visión ancho, medio y estrecho.
Los sensores que suelen tener un muy estrecho campo de visión son los FLIRs (los más modernos se dice andan ya por 0.3º, los IRST generalmente incorporan campos de visión más grandes, no conozco a ninguna que baje de 3º si exceptuamos el EOTS del F-35 (1º*1º) que combina la función de IRST y de FLIR en un solo sensor siendo el primero de su categoría, pero la información del resto escasea al respecto.
De los pocos modelos occidentales de IRST que se conoce algo, es del conocido como Skyguard del Gripen E, que se dice es una evolución del famoso Pirate del Typhoon de los 90.
Dispone de las siguientes magnificaciones:
- WFoV........... 30 ° * 24 °
- MFoV ..........16 ° * 12.8 °
- NFoV .......... 8 ° * 6.4 °
Por comparar, un FLIR dispone actualmente de magnificaciones de hasta 1º, y se dice que el nuevo Litening 5 vendrá con hasta 0.3º, el EOTS actual como comentaba antes, debería andar igualmente en alrededor de 1º, y al contrario que la mayor parte de los FLIRs, debería tener magnificaciones WFOV similares al de un IRST al uso. Más adelante comentaremos qué significa esto.
El Field of Regard se conoce como el campo máximo de visión que puede escanear un sistema electroóptico ayudado por medio de la rotación del sistema en azimuth y elevación. Suele ser de 120° * 45° en un típico IRST, pero puede ser más, dependerá de cada sistema.
Según las aperturas que hemos citado antes (WfoV, MfoV, NfoV), el Field of Regard se dividirá en un número determinado de Frames; la velocidad a la que se suele escanear dichos frames es la correspondiente a unos 30 frames por segundo, es decir cada frame tardaría 1/30 segundos en ser visualizado, que sería el tiempo que le llevaría al detector recoger los fotones del espectro infrarojo que llegan a él, tomar la imagen, resetear el detector y pasar al siguiente frame o escena.
Los detectores se pueden dividir en varios tipos; scanning arrays y los más recientes staring arrays; los scanning arrays a su vez se dividen en 3 categorias. 1º generación la formada por 1 solo detector, de 2º generación la formada por una fila o columna de detectores que cubrirían un lado del frame, y de 3º generación que sería la formada por 1 fila de detectores y 1 columna.
Como su nombre indica, en los scanning arrays cada frame necesita ser escaneado por el detector o detectores, mientras que en los staring arrays están compuestos por una matriz total de detectores que forman todo el frame. La imagen o escaneo de ese frame se formaría de una sola vez, mientras con los scanning arrays necesitan ser escaneados paulatinamente.
El tiempo total de escaneo del frame sería el mismo para
ambos sistemas, pero mientras con los staring arrays los detectores se tomarían
1/30s, en el caso del único detector del scanning arrays debería dividir el
tiempo total entre el número de escaneos que necesitaría para cubrir ese frame
determinado. Eso implica menos tiempo de detección, y por lo tanto menor
sensibilidad que si se usase una matriz de detectores como los staring arrays
más modernos.
El sistema Irst coinocido como Pirate parece indicar que sería un sistema scanning array de segunda generación, hoy en día todos los sistemas Irst modernos son Staring arrays, incluído el nuevo skyward del Gripen que es una evolución del Pirate. El Pirate se dice tenía originalmente un array de detectores de 10*760. En su momento era de lo mejor. El F-35 que se diseñó 10 años después ya pudo aprovecharse de los sensores staring arrays, cuya tecnología no estaba lo suficiente madura cuando apareció el Typhoon, y lo mismo le pasaría al F-22, que es de la misma época que el Typhoon, y cuyo previsto AIRST sería con casi toda probabilidad del tipo scanning array.
El paso de sistemas scanning arrays a staring arrays (los
países que tecnológicamente se lo pueden permitir), era previsible ya que en
los sistemas scanning cuando se intenta aumentar demasiado el número de píxeles
en el sensor y obtener mejores resoluciones para detectar más lejos, trae
aparejado el problema a mayores de llevar a una reducción de la velocidad de
escaneo, ya que al aumentar drásticamente los pixeles reduces el IFoV de cada
uno de ellos, por lo que escanear todo el Frame lleva mucho más tiempo que si
el IFoV fuese más grande.
Cuando aumentas mucho el número de píxeles en los scanning
arrays ese 1/30” por cada frame se alarga para darle tiempo a cada píxel a
recoger los fotones térmicos que le van llegando, y eso no es positivo ya que
al alargar el tiempo, más posibilidades de no detectar al objetivo aunque se
encuentre en el sector de escaneo.
Lo que se puede hacer es reducir el tiempo que cada píxel
realiza para completar todo el frame, y así mantener los 1/30” totales, el
problema es que al hacer eso, bajas la sensibilidad del píxel al reducir el
tiempo de exposición a los fotones en cada IFoV, con lo que la ratio
señal/ruido se reduce, con el resultado de que objetivos que antes sí
detectarías ahora ya no serías capaz de detectarlos.
Para solucionar entre otras cosas esto, nacieron los Staring Arrays, una matriz de sensores ocupando todo el Frame y aunque aumentes el número de pixeles al ocupar toda la escena, nunca vas a tener una velocidad de escaneo superior a 1/30 segundos.
En el siguiente esquema un resumen de lo expuesto, aunque dependiendo de las fuentes, se pueden encontrar en la evolución de los sistemas distintas categorías:
 |
| Elaboración propia |
 |
| Elaboración propia |
Vamos a explicar un poco en la práctica que significa todo esto;
Supongamos que disponemos de un Irst con un estrecho campo de visión de 3° * 3° y un detector de 2º generación formado por una columna de 768 detectores (es lo que se rumorea el número de detectores disponía el Pirate). Esto significa que a una distancia de 100 kms, el campo de visión (Field of view) correspondería aplicando trigonometria a una superficie aproximada de 5.2 kms de altura * 5.2 kms de anchura.
Al tener 768 detectores, deducimos que a cada detector le corresponderá la tarea de registrar el espectro térmico en una superficie de aproximadamente 6.8 metros * 6.8 metros.
Ese mismo array de detectores si en vez de tener un campo de
visión de 3°*3°, se lo ampliamos a por ejemplo a 30° * 30 °, lo que tendríamos
es qué a cada detector, le correspondería una superficie de 68*68 metros
cuadrados.
En el primer caso sería posible el detectar algo a tan larga distancia, pero en el segundo todo lo que hubiese en esos 68*68 metros cuadrados se tomaría como la medición de una temperatura promedio, sería imposible de detectar nada a tan larga distancia ya que la diferencia de temperatura en tanto espacio nos haría un promedio bajo con poco contraste con el detector adyacente. Además no cumpliría con el criterio Johnson de detección e identificación (1).
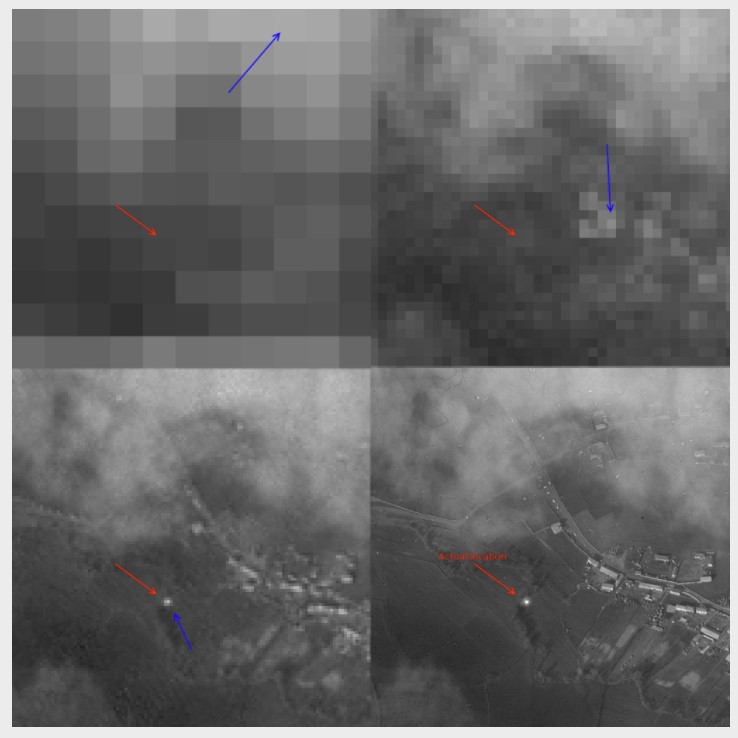
Esto creo que se entiende bien con la siguiente imagen
gráfica (Figura 2) dónde podemos ver la imagen con muy buena resolución y la
imagen con muy poca resolución, pasando por varios estadios intermedios de
resolución. En la imagen con muy poca resolución, cada detector se ocupa de una
gran porción de espacio cómo es sencillo adivinar.
La flecha azul es dónde creemos puede estar la fuente de calor a detectar en cada una de las imágenes, y la roja dónde verdaderamente está presente.
No seremos capaces de adivinar dónde está hasta al menos la tercera imagen que ya cuenta con una resolución decente, dónde cada detector se ocupa de una zona lo suficiente pequeña como para hacer destacar ese foco térmico ante nuestros ojos.
Aunque tampoco es muy clara ya que vemos que en la tercera
imagen el foco térmico se podría incluso confundir con los tejados de las casas
de la derecha, y vemos como en la imagen final ya no hay duda alguna del foco
térmico al contar con una resolución muy adecuada, cada pixel se ocupa de una
zona mucho más pequeña del espacio.
Por lo tanto, es importante contar con una muy buena
resolución, pero que cuadra mal con excesivos campos de visión que a su vez
influyen en la velocidad de escaneo, ya que cuanto más espacio abarques por
pixel, más rápido escanearás una gran porción de espacio; se necesita pues,
llegar a compromisos entre campo de visión y resolución. De ahí que nazcan
varios modos de magnificaciones en un mismo IRST según las necesidades.
Cuando queremos hacer una busca rápida usaremos el
ancho/medio campo de visión, dejando solo para identificaciones el estrecho
campo de visión. El problema es que las distancias de detección caen cuanto más
grande sea nuestra magnificación (2).
Fig. 2
Otro ejemplo.
Si el Field of regard es de por ejemplo 150°*90° y dispones de un field of view de 3°*3°, esto significa que el número total de frames para escanear todo ese Field or regard será de unos 1.500 frames. Si tu velocidad de escaneo es de unos 30 Fps, esto nos lleva a que cada segundo podrás escanear unos 30 frames, lo que nos lleva a que la totalidad de esos 1.500 frames te lleve escanearlos unos 50 segundos. En realidad debería ser más, ya que necesitas para que no se te pase ningún detalle superponer la mitad de un frame a la de otro, sino corres el riesgo de que se te pase entre frame y frame la detección de algo al no percibirlo suficientemente nitido. Lo que nos daría tener que doblar esos 50 segundos en 100 segundos, un poco menos de 2 minutos escanear todo ese espacio. Si hablamos de que con el mismo array de detectores quieres más precisión, lo que harás será magnificar más, por ejemplo a 1°*1° para que cada detector se ocupe de un área del espacio mucho más reducida pero entoncés el tiempo total para escanear todo el área lo triplicas, resultando contraproducente. Necesitas o mejorar la resolución de tu array de detectores (eso lleva años de evolución en la tecnología de sensores) o ampliar tu campo de visión para ser más rápido escaneando, pero con la desventaja de reducir tus detecciones.
Es por esto que se usan diferentes magnificaciones, algunas
como vemos en el Skyguard de 16° o más. Aviones que vuelen a pongamos 40-50
kms, no puedes usar la máxima magnificación ya que a esas distancias un avión
subsónico que vuele a 250 m/s (900 kms/h) le llevaría apenas 5-10 segundos
saltar de un cuadro a otro, mientras tú no sabes qué zona está escaneando tu
IRST el cual le llevaría más de minuto y medio escanear toda la zona, el avión
podría estar moviéndose en la zona de búsqueda y no coincidir en su detección
en el mismo frame que ocupa y que se escanea al mismo tiempo.
Esto, es a lo que nos lleva a creer que los datos dados por fabricantes siempre son con las mejores condiciones atmosféricas presentes, con la máxima magnificación, pero sabiendo siempre a dónde mirar en el cielo, porque alguien o algo nos lo ha dicho previamente.
Cuanto más cerca esté el avión más tendrás que abrir tu
campo de visión al ser este más rápido su movimiento en relación al espacio a
cubrir, de ahí esos anchos campos de visión de hasta 30°.
Justin Bronk hace los siguientes comentarios, al respecto.
The fact is, even with some of the best IRST in the world, there is no way a Typhoon would know where to find the F-35 Joint Strike Fighter."You still have to know where to look," said Bronk, which would be "almost impossible."
First off, there is an "enormous amounts of clutter and all sorts of Air Force missile threats in any contested environment."Secondly, IRST is hugely affected by weather. Humid parts of the world are inhospitable, and the thermal imaging works better at night when the skies are cooler.
But even on a good day, looking for fifth-generation aircraft in the open skies with IRST is like "looking through a drinking straw," said Bronk. "The [IRST] field of regard (*) is quite small... and it's much much harder to perform a wide sector scan in a way that a radar can," said Bronk.
(*) se refiere a Field of View.
En el caso del DAS el Field of regard y Field of View son lo mismo, merece capítulo aparte, ya que todos los aviones nuevos que entren van a venir con sistemas similares al revolucionar la conciencia situacional del avión.
El Pirate dispone de 3 modos principales de búsqueda, uno entiendo que manual, y los otros 2 conocidos como Sector Adquisition, esclavo a otro de los sensores del avión y el Slave Adquisition, esclavo a otros sensores externos al avión, por ejemplo algo que le venga vía datalink.
El EODAS o Sistema de apertura distribuida electro-óptico,
es un sistema compuesto por 6 detectores situados en lugares y ángulos tal que
cubren los 360° en azimuth y elevación del avión. Forman así una pantalla
alrededor del avión sin importar el rumbo del mismo.
Cada uno de estos 6 sensores tiene un ángulo de visión que coincide con el Field of regard intantáneo de 120°*120° y sensores adyacentes se solapan unos a otros de tal manera que no se produzca en ningun momento puntos o zonas ciegas sin cubrir.
Se dice por la fecha en la que fue sacado el dispositivo que cada sensor estaría formado por un array de detectores de 1 Mpx (1000*1000 pixeles), algunos comentan que podría ser de 4 Mpx pero esto es bastante dudoso cuando Pods de comienzos de la decada de los 2.000 disponían de sensores de 0.3Mpx, así que la cifra de 1 Mpx sería la más sensata. Hoy en día con el nuevo DAS que augura duplicar las prestaciones es probable que estemos hablando de sensores de minimo 4 Mpx o porque no el doble.
Tomando pues 1 Mpx y viendo que necesitan cubrir un ángulo de 120°*120° tenemos que cada detector se encargaría de un campo de visión de 0.12°, lo que significaría que a:
- 25 kms, se ocuparía de la detección de una superficie de 52*52 m2
- 50 kms, de 105*105 m2
- 100 kms, de 209*209 m2.
Cómo vemos el sistema más allá de distancias pequeñas de entre 0-25 kms sería incapaz de descifrar si lo que parece ser un avión hostil es en verdad un fuego de una fábrica o de otra naturaleza, ya que es tanta la superficie que un solo pixel necesita escanear que no se sabría si existe movimiento relativo o pertenece a un elemento fijo, movil o es simplemente ruido. Se necesita mucha mayor resolución.
A pesar de esto, el DAS tomará cada vez más protagonismo
sobre sistemas tradicionales como el IRST o FLIR, y en un futuro según avance
la tecnología no sería descartable que desapareciesen estos en favor del DAS y
solo quedasen como función de identificación puntual a muy larga distancia pero
no de escaneo.
Próximamente se espera una mejora del DAS del F-35, una actualización de sensores que se espera doblar las prestaciones actuales, si pasan tan siquiera a meterle unos sensores de 4Mpx, tendríamos que a 25 kilómetros, cada pixel abarcaría 0.03° lo cual lo situaría en una superficie de 13*13 metros, lo que claramente entra dentro de las dimensiones de un caza.
Tener una burbuja de escaneo térmico alrededor del avión en todo momento, le da al avión una imagen táctica de todo lo que se mueva a distancias cortas/medias, con posibilidad de obtener rápidamente la mayoría de los parámetros para una solución de disparo sin importar por dónde se acerca el avión al estar escaneando continuamente 360º y azimuth y elevación. Esto es lo que se conoce vulgarmente como los ojos de dios para referirse al DAS.
Ventajas e inconvenientesComo ventaja principal de estos sensores, tenemos que son sensores pasivos, por lo que se uso, no delata nuestra presencia (a menos que usemos el laser rangefinder), y el poder observar sin ser observado, lo hace un sensor muy importante en casos en los que se requiera el seguimiento de un objetivo sin encender el radar.
Pero tiene unas contras bastante importantes, estas contras dependen de factores externos a nosotros, por lo que no podemos hacer nada o casi nada al respecto para remediarlo, al menos actualmente; uno de estos problemas son las [b]condiciones atmosféricas[/b]. Cuando se habla de largas detecciones siempre es en las mejores condiciones climáticas para los sistemas.
Sin embargo, en la vida real esto no es lo común, un día muy
lluvioso, puede hacer caer las distancias de detección tanto como un 90 %
tranquilamente, dejando las detecciones a poco más de 10 kms de distancia
incluso observando al avión de espaldas mostrando sus propulsores.
Así que habrá ocasiones en que los sistemas electroópticos
sean de poca o nula utilidad su uso, y hay latitudes, dónde esas condiciones de
lluvia o humedad a determinadas alturas es frecuente.
 |
| Infrared Search & Track Systems as an Anti-Stealth Appoach, pág 50, Jornal of computations 6 Modelling, vol 9, nº1, 2019 |
Otro problema al que se enfrentan los sensores térmicos es cuando el objetivo no ofrece suficiente contraste térmico sobre el fondo. Un objetivo cuyo fondo sea el frío cielo nocturno con una temperatura uniforme, tendrá un contraste térmico adecuado para poder detectarlo desde grandes distancias. Al contrario, ese mismo objetivo cuyo fondo sea una ciudad o terreno en el que hay variaciones de temperaturas, y un contraste térmico reducido con el objetivo al retener el suelo terrestre calor, hace que detectar desde un plano superior aviones hostiles no sea posible a distancias tan elevadas. De hecho lo que detectan los sensores son los contrastes entre el objetivo y el fondo. Si ambos tienen temperaturas muy similares, la detección no se produce aunque haya un objeto.
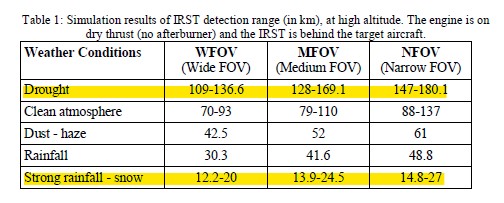
En la vida real, los aviones hostiles generalmente van
llevar aproximaciones más o menos frontales, en este caso las detecciones caen
una barbaridad como muestra la siguiente tabla que sirve de ejemplo.
 |
On the use of Aesa, radar and Irst System to detect and track low observable Threats, pág 6 |
Escaneando de una manera rápida con el WFoV, y dependiendo
de las condiciones climatológicas reinantes y del contraste, la detección de un
caza táctico de 4º generación, frente a un IRST moderno se situaría entre los
35 y los 6 kms. Si suponemos estas patrullando en el báltico y te encuentras
con fuerte lluvia o nieve, algo que es común la mayor parte del año, las
detecciones frontales apenas alcanzan 6-13 kms.
Con el advenimiento de la fusión de datos, se aprovecha lo
mejor de cada sensor, y se obtiene un track más preciso y limpio. Un Irst puede
aportar un rumbo mucho más preciso que cualquiera de los otros sensores, el
radar una distancia precisa y la suite electrónica una elevación y rumbo
precisos, fusionando todos esos datos mediante un núcleo de fusión, se obtiene
una detección más temprana y un track mucho más claro y preciso que lo harían
los sistemas por separado.
Resumiendo, las condiciones meteorológicas y las condiciones de contraste pueden hacer variar muchísimo para mal las teóricas detecciones anunciadas por fabricantes que siempre son bajo las mejores condiciones para los sensores en cuento a condiciones atmosféricas y de contraste y el avión hostil ofreciendo su peor aspecto térmico que es la vista desde atrás de sus propulsores. Esto en la vida real no suele ocurrir o es difícil que todas estas condiciones se produzcan a la vez.
Los sensores térmicos están formados por elementos químicos
que dependiendo del que se use abarcará un ancho determinado del espectro
térmico. Se suelen dividir en 3 categorías:
- SWIR, sensores térmicos cuya longitud de onda es de entre 1-2.5 µm
- MWIR, sensores térmicos cuya longitud de onda es de entre 3-5 µm
- LWIR, sensores térmicos cuya longitud de onda es de entre 8-14 µm
Tabla dónde se muestran las características y diferencias de
cada espectro térmico. Véase como si se quiere disponer de un sensor capaz de
detectar las emisiones del propulsor de un caza se ha de disponer de un sensor
que trabaje en el espectro MWR, mientras que si se busca uno que incida en la
radiación producida por el fuselaje se ha de inclinar hacia el espectro LWR.
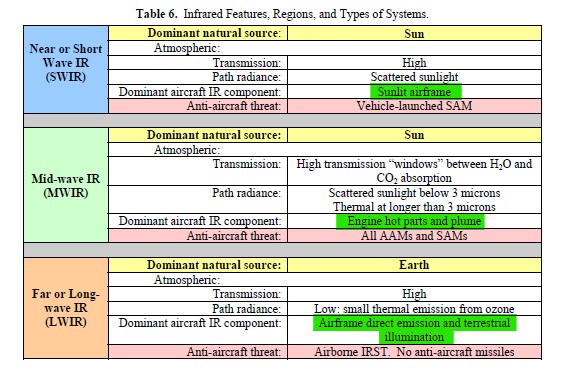 |
| IR sub-bands of Military interest, Aircraft Infrared Principles, Signatures, Threats, and Countermeasures, NAWCWD |
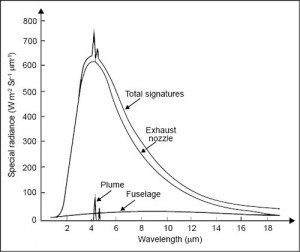
Los sistemas térmicos actuales, generalmente disponen de 1
banda de frecuencia o 2 a lo sumo, pero no abarcan todo el espectro térmico.
Esto es relevante porque hay radiación térmica que dependiendo del sistema que
uses podrás detectar con mayor probabilidad o no. En la siguiente imagen vemos
con la radiación térmica producido por el penacho de gases del propulsor emite radiación
térmica entre más o menos 3-5 µm, si tu avión está equipado con un IRST que usa
detectores MWIR sí podrá detectar esa radiación, pero no así si solo usa
detectores que trabajen en la banda LWIR. Para evitar estas cosas se suele usar
sistemas con detectores que trabajen en al menos 2 bandas, pero parece ser que
el rendimiento es menor que si solo trabajase en 1 sola banda por separado.
Para detectar un avión furtivo actual que fuese diseñado con reducciones de su firma térmica, como comenta Bronk arriba, sería muy difícil de detectar a distancias prudenciales, porque no se sabe a dónde mirar exactamente y necesitarías usar tu máxima magnificación para disponer de la mejor resolución, lo que te llevaría a tener una velocidad de escaneo mucho más pequeña.
Un avión de 4º acercándose de frente muestra la entrada a
los propulsores con gran claridad, sobre todo un avión tipo Flanker, en este
caso el calor generado en los álabes es visible frontalmente, sin embargo esto
no sucede en aviones furtivos, dónde la vista al propulsor está tapado
frontalmente mediante unos conductos en S, por lo que la visión térmica vista,
desaparece en gran parte quedando solo la que genere el propio cuerpo con su
fricción en la atmosfera. Las cifras de detección que pueden ser más o menos
válidas para un avión de 4º frontalmente, no lo serían contra aviones furtivos
tipo F-35, J-20 o mismo el nuevo Checkmate que igualmente tapa la vista del
propulsor desde el frontal, esas cifras caerían mucho de valor. No pasa lo
mismo con el Su-57, dónde su propulsor es visible frontalmente, aunque algo
remediado con la instalación de un bloqueador.
El criterio que se suele seguir a la hora de detectar, reconocer e identificar claramente un objeto con sistemas térmicos es el conocido como criterio Johnson. Así tenemos que:
- Para detectar algo, se necesita al menos que su dimensión critica sea cubierta por 1,5 o más píxeles.
- Para reconocer algo, se necesita al menos que su dimensión critica sea cubierta por al menos 6 píxeles.
- Para identificar algo, se necesita al menos que su dimensión critica sea cubierta por al menos 12 píxeles.
La dimensión crítica de una persona de 1,80 metros es de 0,75 metros. De aquí más o menos se puede extrapolar las dimensiones críticas para aviones de distintos tamaños. Para un avión táctico mediano esa dimensión crítica anda alrededor de los 7 metros.
Por esto, aunque un sistema electroóptico detecte algo a
larga distancia, su identificación solo se produciría a un 30-40% de la
distancia a la que ha sido detectado usando la misma magnificación o incluso
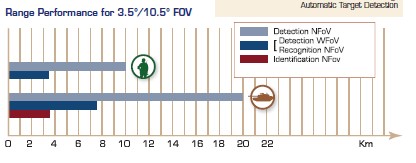
menos como muestra la siguiente imagen de una cámara térmica.
 |
| Thales Group Catherine MP |
Se puede observar como la detección con NFoV de 3.5° es mucho más grande que la que se obtiene con un WFoV de 10.5°. Pero eso se consigue a costa de un escaneo al menos 3 veces más lento. Y esto, en muchos casos es un problema. Pero si sabes a dónde mirar exactamente, porque otro sensor te lo ha dicho, entonces sí es posible un seguimiento pasivo de ese objetivo a largas distancias.
Últimamente vemos como aviones provistos de IRST, llevan sin
dudar PODS externos en sus misiones de policia aérea, y esto lo hacen porque
los Pods están provistos de magnificaciones superiores al del IRST, para que
esa identificación sea lo más rápida y lejana posible. Y recordemos qué sin
identificación clara, no se debe apretar el gatillo. Se apunta a que el
Litenning 5 tendrá una FoV de apenas 0.3º*0.3º, si antes desde que se detectaba
algo, hasta que se producía la identificación debía caer la distancia un buen
trecho, ahora se podrían realizar identificaciones al poco de realizar las
detecciones.
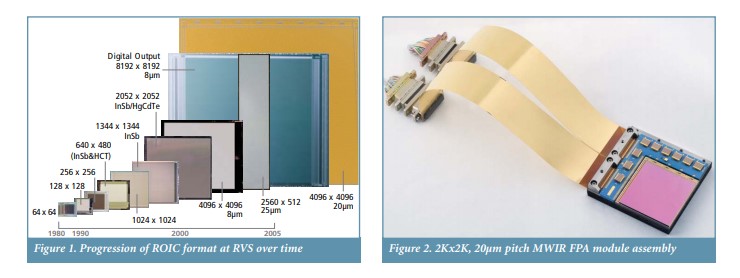 |
| Evolución sensores térmicos vía Raytheon |
 |
| Principales fabricantes de sensores térmicos con enfriamiento y sus características, vía History of infrared sensors |
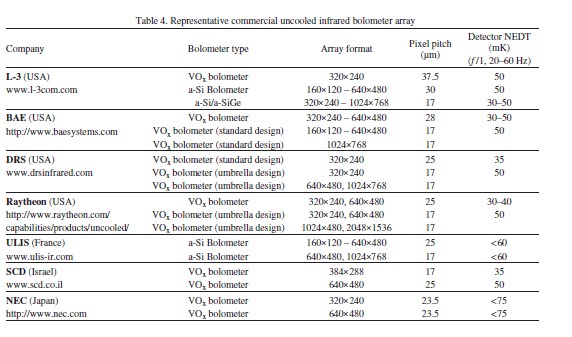 |
| Principales fabricantes de sensores térmicos comerciales sin enfriamiento y sus características, vía History of infrared sensors |
Bibliografía empleada y/o fuentes de interés:
- Thermal imaging: how far can you we see with it?, http://www.Flir.com
- https://basicsaboutaerodynamicsandavionics.wordpress.com/2017/02/22/electro-optical-systems/
- https://basicsaboutaerodynamicsandavionics.wordpress.com/2016/03/04/stealth-techniques-and-benefits/
- Atmospheric effects on EO sensors and systems, June 2005, Naval Meteorology and Oceanography
- https://www.leonardocompany.com/documents/20142/3149789/Skyward+-+IR+Search+%26+Track+System+%28mm08130%29+HQ.pdf?t=1604914761890
- Passive Electrooptical Systems, Stephen B, Campana.
- https://www.thalesgroup.com/sites/default/files/database/d7/asset/document/1.1%20-%20Cath%20MP%20Datasheet%20.pdf
- On the use of AESA (Active Electronically Scanned Array) Radar and IRST (InfraRed Search and Track) System to Detect and Track Low Observable Threats George-Konstantinos Gaitanakis, George Limnaios, Konstantinos C. Zikidis, MATEC Web Conf. 304 04001 (2019) DOI: 10.1051/matecconf/201930404001
- Aircraft Infrared Principles, Signatures, Threats, and Countermeasures, NAWCWD, Jack R. White
- https://www.electronicsforu.com/technology-trends/precision-guided-munitions-infra-red-guided-weapons-part-3-4
- https://electronics.leonardo.com/en/products/pirate_irst
- Highlighting Raytheon technology, 2008
- History of infrared detectors, A. Rogalski, Institute of apllied physics, Polonia